

Tijdens de GTC-conferentie heeft NVIDIA een reeks geavanceerde technologieën gepresenteerd om de ontwikkeling van humanoïde robots te versnellen. Onder deze technologieën valt NVIDIA Isaac GR00T N1 op, het eerste volledig aanpasbare open-source basismodel, ontworpen om robots uit te rusten met geavanceerde redeneercapaciteiten en gegeneraliseerde vaardigheden.
Samen met het model heeft NVIDIA simulatie-frameworks en innovatieve tools aangekondigd, waaronder de Isaac GR00T Blueprint voor de generatie van synthetische data en Newton, een open-source fysische motor ontwikkeld in samenwerking met Google DeepMind en Disney Research.
Summary
Isaac GR00T N1: de toekomst van robotische intelligentie
Met Isaac GR00T N1, maakt NVIDIA een belangrijke stap vooruit voor de robotica, dankzij een dubbel systeemarchitectuur geïnspireerd door de principes van de menselijke cognitie:
- Sistema 1: een snel en intuïtief model, dat als een automatische reflex handelt om onmiddellijke acties uit te voeren.
- Sistema 2: een langzamer en methodischer model, in staat om de context te analyseren en complexere strategieën te plannen.
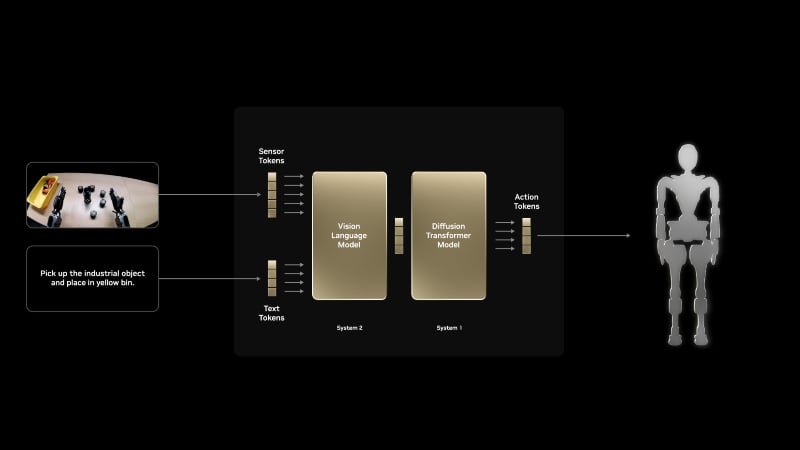
Het model integreert een Vision Language Model (VLM) dat de omgeving en de ontvangen instructies interpreteert, en deze vertaalt in nauwkeurige en vloeiende bewegingen. Dankzij een uitgebreide dataset van menselijke demonstraties en synthesedata gegenereerd door het NVIDIA Omniverse-platform, is GR00T N1 in staat zich aan te passen aan een breed scala van geavanceerde robotische taken, zoals:
- Objecten vastpakken met een of beide handen.
- Verplaatsen en overbrengen van objecten tussen verschillende ledematen.
- Uitvoeren van multi-step operaties met hoge precisie.
Deze capaciteiten maken het bijzonder geschikt voor industriële en huishoudelijke toepassingen, zoals materiaalmanipulatie, verpakking en inspectie.
In de onderstaande officiële video presenteert NVIDIA de belangrijkste functies van de nieuwe Isaac GROOT N1:
Praktische toepassingen en eerste veldtesten
De mogelijkheden van het model zijn al aangetoond door 1X Technologies, dat GR00T N1 heeft gebruikt om zijn humanoïde robot NEO Gamma te trainen voor het uitvoeren van autonome opruimtaken. Volgens Bernt Børnich, CEO van 1X, stelt het model in staat om meer aanpasbare robots te ontwikkelen die snel kunnen leren met minimale hoeveelheden extra gegevens.
Naast 1X hebben andere toonaangevende bedrijven in de robotica, waaronder Agility Robotics, Boston Dynamics, Mentee Robotics en NEURA Robotics, vroege toegang verkregen tot GR00T N1 om nieuwe toepassingen te verkennen.
Newton: de fysieke motor voor de volgende generatie robots
Om de capaciteit van robots om met de fysieke wereld te interageren verder te verbeteren, heeft NVIDIA Newton aangekondigd, een open-source fysische motor ontwikkeld samen met Google DeepMind en Disney Research. Gebaseerd op het NVIDIA Warp platform, zal Newton geoptimaliseerd zijn voor robotisch leren en compatibel met MuJoCo van Google DeepMind en NVIDIA Isaac Lab.
Disney Research zal Newton gebruiken om zijn roboticaplatform voor entertainment te verbeteren, al gedemonstreerd tijdens de GTC-keynote met de door Star Wars BDX geïnspireerde droids. Volgens Kyle Laughlin, Senior Vice President van Walt Disney Imagineering Research & Development, zal deze samenwerking bijdragen aan het creëren van expressievere en meeslepende robots voor het publiek.
Het belang van synthetische gegevens voor robottraining
Een van de belangrijkste obstakels bij de ontwikkeling van mensachtige robotica is de noodzaak van grote hoeveelheden gegevens voor training. Om deze uitdaging aan te gaan, heeft NVIDIA de Isaac GR00T Blueprint voor de generatie van synthetische gegevens gelanceerd. Deze tool, gebaseerd op Omniverse en Cosmos Transfer, maakt het mogelijk om enorme hoeveelheden bewegingsgegevens te produceren uit een beperkt aantal menselijke demonstraties.
Dankzij deze technologie heeft NVIDIA 780.000 synthetische trajecten gegenereerd, wat gelijk staat aan 6.500 uur aan menselijke data, in slechts 11 uur. Door een combinatie van synthetische en echte data te gebruiken, zijn de prestaties van GR00T N1 met 40% verbeterd in vergelijking met training die uitsluitend op echte data is gebaseerd.
NVIDIA GR00T N1 en Newton: beschikbaarheid en toegang tot de instrumenten
Om ontwikkelaars verder te ondersteunen, heeft NVIDIA beschikbaar gesteld:
- De trainingsgegevens en evaluatiescenario’s van GR00T N1 op Hugging Face en GitHub.
- Het Blueprint van Isaac GR00T als interactieve demo op build.nvidia.com en te downloaden van GitHub.
Ten slotte zal de nieuwe persoonlijke supercomputer NVIDIA DGX Spark, die ook op de GTC werd gepresenteerd, een geavanceerde infrastructuur bieden om de capaciteiten van GR00T N1 uit te breiden zonder de noodzaak van complexe programmering.
Conclusies: de toekomst van humanoïde robotica
Met deze instrumenten streeft NVIDIA ernaar om de humanoïde robots steeds autonomer, efficiënter en aanpasbaarder te maken, waardoor nieuwe grenzen worden geopend in de integratie vankunstmatigeintelligentie in het dagelijks leven en de industriële wereld.
De combinatie van Isaac GR00T N1, Newton en de generatie van synthetische data vertegenwoordigt een enorme stap vooruit voor de robotica, waardoor we dichter bij een nieuw tijdperk komen waarin humanoïde robots een integraal onderdeel van onze samenleving zullen zijn, naast mensen in complexe en repetitieve taken.